
#vasútmodell #digitális #dcc
Ebben a videóban megpróbálom elmondani a tapasztalataimat arról, hogy digitális rendszerek esetén milyen szempontok alapján érdemes beállítani a vontatójárműveinkben a gyorsulási és lassulási paramétereket.
A közzététel óta érkezett egy észrevétel a videó alá, amiben a modellezőtárs azt írta, hogy az általam tapasztalt jelenség oka az, hogy nincs jól beállítva valami, és hogy a Train Controller folyamatosan, ugrás nélkül vezérli a járműveket, tévesen állítom azt hogy nem, és nem szükséges 0-nál nagyobb értéket beállítani a CV3 és CV4-re. A kommentelő szerint a dekóderben kell beállítani rendesen a sebességet, és azt, hogy 128 lépcsős legyen a sebességfokozat. Lentebb egy kép a videóban használt V43-as sebességprofiljáról.
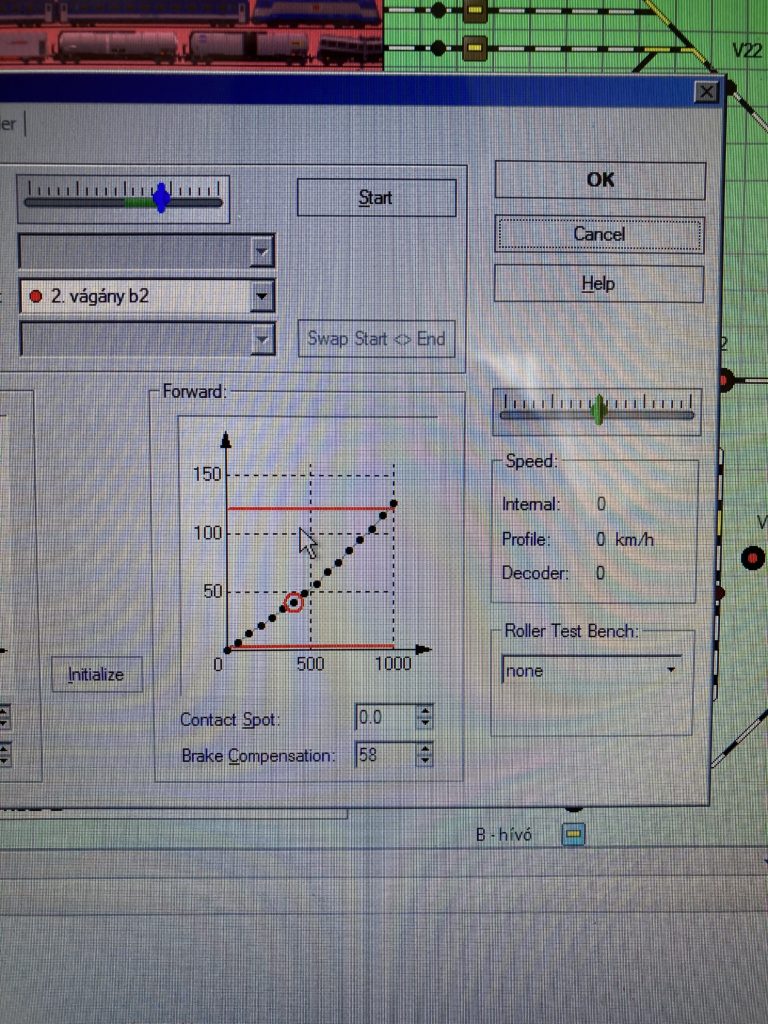
Nem tudom lehet-e ennél pontosabban beállítani, a mozdony teljes sebességen 130km/h körül alakul, ami megfelel a méretarányos sebességnek, és a dekóder 128 lépésre van állítva (alapból 10+ éve minden járművet 128 lépésen használok). A középsebesség picit lejjebb van, hogy alacsonyabb sebességnél finomabban lehessen szabályozni a mozdony mozgását. A videón okkal tettem a kép sarkába a RailCom monitoron az aktuális a pályába kimenő sebességparancsot, mert pont az látszik rajta, hogy gyorsításnál még csak 12-15 értékeket ugrál, de lassításnál sokkal durvábban veszi vissza a sebességet, mint ahogy azt elvárnánk, ezen igény szerint lehet finomítani, ha nem elégedett az ember az eredménnyel.
Vasárnap este kíváncsiságból kipróbáltam, és mivelitt nálam a fékrámpa akár 2,3 méter is lehet (van ilyen hosszú szakaszom is), még úgy is 6-9 jól elkülöníthető lépésben ugrik le kúszási sebességre szinte minden jármű, ami járműtől függően 0-ra állított CV4 esetén változó eredményeket produkál. A FLIRT úgy viselkedik mint egy ideges bakkecske, a Piko Szergej viszont egész visszafogottan reagál (ebben szerepe lehet még az adott jármű hajtásának, a lendkerék méretének, és a dekódernek is).
Ez a szabályzás a program adottsága. Én személy szerint elég érzékeny vagyok arra, hogy a járművek a lehetőségekhez képest realisztikusan mozogjanak, és itt ezt arra is értem, hogy kitérőbe érkezve 40km/h-ról ne 2 méter legyen a fékútjuk (mert a valóságban sem annyi lenne), és ne csorogjanak 30-40 centiket 5-8 km/h-s kúszási sebességgel (a valóságban nagyon nem látunk ilyet szintén), mert ez számomra nem szép. Ez az a rész, amikor bizony kísérletezni kell, és olyan dolgokat is kipróbálni, amiket nem írtak a könyvekbe. Az eredményt meg láthatjátok a videóimban.


