Ebben a videóban a @RocoModellbahnen V. korszakos GySEV 1047 501-es pályaszámú Siemens EuroSprinter villanymozdonyának H0 építési nagyságú modelljét mutatom be nektek röviden.
Gyártó: Roco Vasúttársaság: GySEV Korszak: V. Pályaszám: 1047 501 Honállomás: Sopron Cikkszám: 63688 Kiadás éve: 2003
—
A bemutatott modell saját tulajdonú, másodkézből vásárolt példány.
Ebben a videóban azt teszteltem le, hogy milyen eredményre számíthatunk, ha a gyári méretű hangvödörbe való 1W-os helyett egy 2W-os V.I.P. Modell gyártmányú hangszórót és a hozzá való hangvödröt használunk a Piko NOHAB mozdonyunkban.
Ebben a videóban arra keresem a választ, hogy milyen különbség van azonos hanganyag és dekóder használata esetén egy szimpla hangszórós egyszerű kis hangvödrös megoldás és egy duplahangszórós nagy hangvödrös megoldás között hangzás tekintetében.
A teszthez az MTB MDa motorkocsiját használtam, a DigiTools hanganyagával. A szimpla hangszórós saját motorkocsimban egy kockahangszóró és a hozzá való kis hangvödör volt beépítve (a félreértések elkerülése érdekében szeretném tisztázni, hogy ez nem a DigiTools hangszórója és hangvödre), a kölcsönkapott dupla hangszórós modellbe pedig ugyanez a típusú hangszóró volt megtalálható LimitBahn gyártmányú hangvödrökben.
A Limit hangvödör a Happy Modell-nél kapható jelenleg.
Ebben a videóban gyakorlati példákon keresztül nézem meg közelebbről, hogy egy Roco fehér z21 és egy 10764-es központ használatának esetén milyen konkrét sínfeszültségeket mérhetünk, és hogy a mozdonydekóderek miként vezérlik a modellmozdonyok morotjait.
Ebben a videóban egy kis visszatekintés keretében három Roco Eurosprinter és egy Piko Szili segítségével azt mutatom be, hogy mennyit fejlődtek a digitálisan előkészített és digitális H0 vasútmodell mozdonyok elektronikai téren az ezredforduló óta, és hogy mikre érdemes a modernebb mozdonyok üzemeltetésénél figyelni.
Ebben a videóban azt mutatom be hogy miként programoztam az action markerek és a menetrend segítségével változatos az igazinak megfelelő menethangokat, és funkciókat a TrainController 7-es programban, és használtam ki a @DigitoolsElektronika DigiSound5-ös NOHAB hangdekóder képességeit.
Ebben a videóban azt mutatom be, hogy miként készítettem egy gombbal indítható menetrendet a V43-as IC vonatomhoz TrainController-ben. Azt szerettem volna megvalósítani, hogy a szerelvény egy gombbal indítható legyen úgy, hogy indulás előtt a mozdony felkapcsolja a megfelelő fényeket, és hangot, majd elinduljon, illetve menet közben a megfelelő helyeken különféle hangokat adjon ki.
A feladatot természetesen máshogy is meg lehet oldani, én az itt bemutatott módszert választottam.
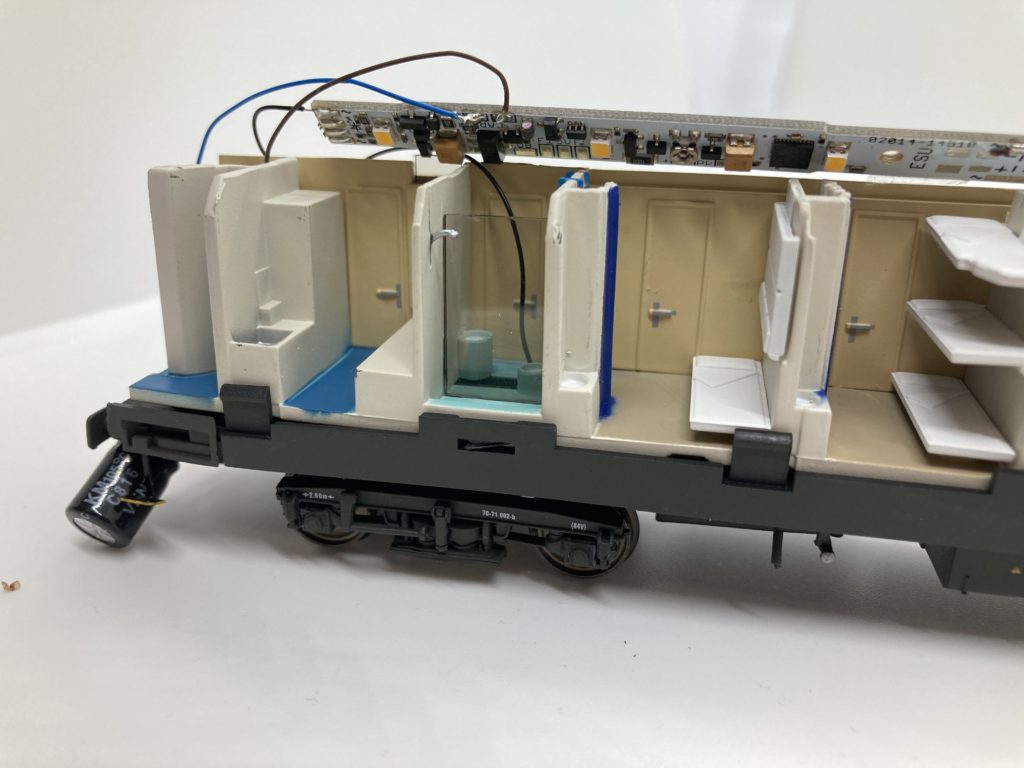
Volt egy kis időm, így elkezdtem beépíteni a Metropol EN kocsijaiba a világításokat. ACME vagonok, szóval nem egyszerű téma. A PKP 2. osztályba viszonylag könnyen bement egy HTech panel, csak két helyen kellett lecsípni az elválasztó-falakból (az ACME legendásan magasra készíti ezeket). A forgóvázból el lett távolítva a tárcsafék imitáció, és a gyári áramszedőlemezt is rendesen beállítottam, majd kétoldalú ragasztóval rögzítettem.
A PKP 2. osztályú ülőhelyes okozta a legkevesebb fejfájást
A fekvőhelyes kocsiba egy ESU panelt raktam, ez a kocsi is könnyen szétjött, itt nem kellett faragni sem.
A fekvőhelyes kocsiba viszonylag simán bele lehetett rakni a digitális világítást.Tetszetős látvány a kidolgozott belső
Az igazi mumus a bautzeni háló volt. Itt volt minden is. A kocsi kasztnija több ponton pillanatragasztóval volt az alvázhoz rögzítve (gondolom, hogy ne álljon el annyira), a pengével történt kipattintás után sem akart engedni, összesen három helyre kellett gitárpengetőt tenni, mire nagynehezen lejött a kocsiszekrény.
A belső szépen meg van csinálva, még a zuhanyzóban lévő zuhanyfej is a helyén van (bár csak ennyi energiát fordítottak volna arra, hogy szépen fusson a kocsi). Mindenhol feliratok, tamponozott kilincsek, ágyak, festett függönyök. Pazar látvány.
Ott a zuhanyfej!WC felirat, tamponozott kilincsek és apró feliratok mindenhol.Ezt sem spórolta le a gyártó.A belsőre nem lehet panasz. A futásra már annál inkább…
Egy ESU panel ment ide is, két helyen kétoldalú ragaccsal megfogatva szépen elfért.
A forgóváznál jött az újabb meglepi, a féktárcsa-imitációkat csak csípőfogóval lehetett eltávolítani, és egy tengely közben réz csapágyastól kipotyogott. Miután összelapátoltam, és visszaragasztottam a csapágyakat, ide is beraktam az áramszedőlemezeket, majd még kaptak a tengelyek némi kenőanyagot a nyikorgás elkerülésére.
Ezek csak csípőfogóval jöttek le, be volt mind ragasztva…
A végeredmény egész jó lett szerintem, de kb. 2x annyi idő egy ilyen ACME kocsit ellátni világítással mint egy bármilyen másikat.
A bautzeni háló kivilágítva. Ez a három kocsi készült el most.
A videóban az MTB M44-esén keresztül bemutatom nektek hogy én miként szoktam egy új vontatójárművet beüzemelni és beállítani a DCC digitális üzemhez a terepasztalomon való használathoz. A videóban a következő témákat járom körbe: Mozdonycím beállítás, mozdony felvitele a multimaus könyvtárába, mozdony hozzáadása a z21 mobiltelefonos alkalmazás könyvtárába és a mozdony hozzáadása a TrainController programhoz.
Ebben a videóban megpróbálom elmondani a tapasztalataimat arról, hogy digitális rendszerek esetén milyen szempontok alapján érdemes beállítani a vontatójárműveinkben a gyorsulási és lassulási paramétereket.
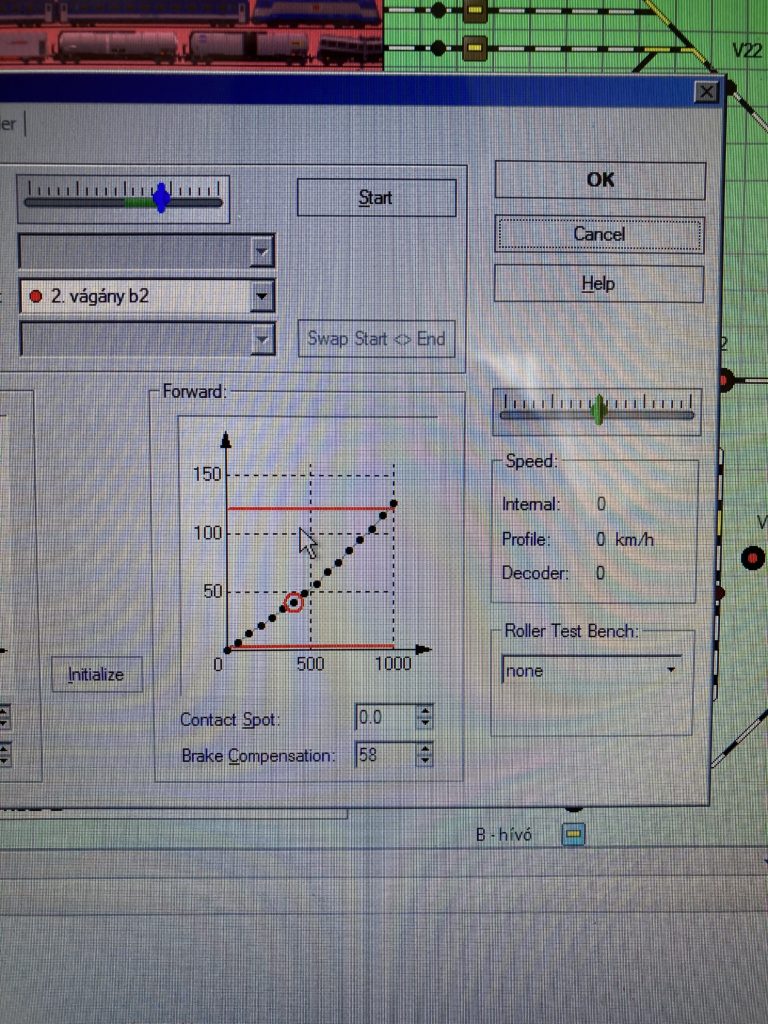
A közzététel óta érkezett egy észrevétel a videó alá, amiben a modellezőtárs azt írta, hogy az általam tapasztalt jelenség oka az, hogy nincs jól beállítva valami, és hogy a Train Controller folyamatosan, ugrás nélkül vezérli a járműveket, tévesen állítom azt hogy nem, és nem szükséges 0-nál nagyobb értéket beállítani a CV3 és CV4-re. A kommentelő szerint a dekóderben kell beállítani rendesen a sebességet, és azt, hogy 128 lépcsős legyen a sebességfokozat. Lentebb egy kép a videóban használt V43-as sebességprofiljáról.
Nem tudom lehet-e ennél pontosabban beállítani, a mozdony teljes sebességen 130km/h körül alakul, ami megfelel a méretarányos sebességnek, és a dekóder 128 lépésre van állítva (alapból 10+ éve minden járművet 128 lépésen használok). A középsebesség picit lejjebb van, hogy alacsonyabb sebességnél finomabban lehessen szabályozni a mozdony mozgását. A videón okkal tettem a kép sarkába a RailCom monitoron az aktuális a pályába kimenő sebességparancsot, mert pont az látszik rajta, hogy gyorsításnál még csak 12-15 értékeket ugrál, de lassításnál sokkal durvábban veszi vissza a sebességet, mint ahogy azt elvárnánk, ezen igény szerint lehet finomítani, ha nem elégedett az ember az eredménnyel.
Vasárnap este kíváncsiságból kipróbáltam, és mivelitt nálam a fékrámpa akár 2,3 méter is lehet (van ilyen hosszú szakaszom is), még úgy is 6-9 jól elkülöníthető lépésben ugrik le kúszási sebességre szinte minden jármű, ami járműtől függően 0-ra állított CV4 esetén változó eredményeket produkál. A FLIRT úgy viselkedik mint egy ideges bakkecske, a Piko Szergej viszont egész visszafogottan reagál (ebben szerepe lehet még az adott jármű hajtásának, a lendkerék méretének, és a dekódernek is).
Ez a szabályzás a program adottsága. Én személy szerint elég érzékeny vagyok arra, hogy a járművek a lehetőségekhez képest realisztikusan mozogjanak, és itt ezt arra is értem, hogy kitérőbe érkezve 40km/h-ról ne 2 méter legyen a fékútjuk (mert a valóságban sem annyi lenne), és ne csorogjanak 30-40 centiket 5-8 km/h-s kúszási sebességgel (a valóságban nagyon nem látunk ilyet szintén), mert ez számomra nem szép. Ez az a rész, amikor bizony kísérletezni kell, és olyan dolgokat is kipróbálni, amiket nem írtak a könyvekbe. Az eredményt meg láthatjátok a videóimban.